qemu-lunchlinux
Categories:
版本信息
系统版本:Ubuntu Server 20.04 LTS 64bit 编译器:9.4.0 交叉编译器:arm-linux-gnueabi-gcc (Linaro GCC 7.5-2019.12) 7.5.0 linux内核:linux-5.15.53 busybox:1.35.0 QEMU:7.0.0 ninja-build:1.10.0
获取交叉编译链
下载地址:Linaro Releases

tar xvf gcc-linaro-7.5.0-2019.12-x86_64_arm-linux-gnueabi.tar.tar #解压
vi ~/.bashrc #修改环境变量PATH,让系统先去指定目录寻找交叉编译链的可执行文件
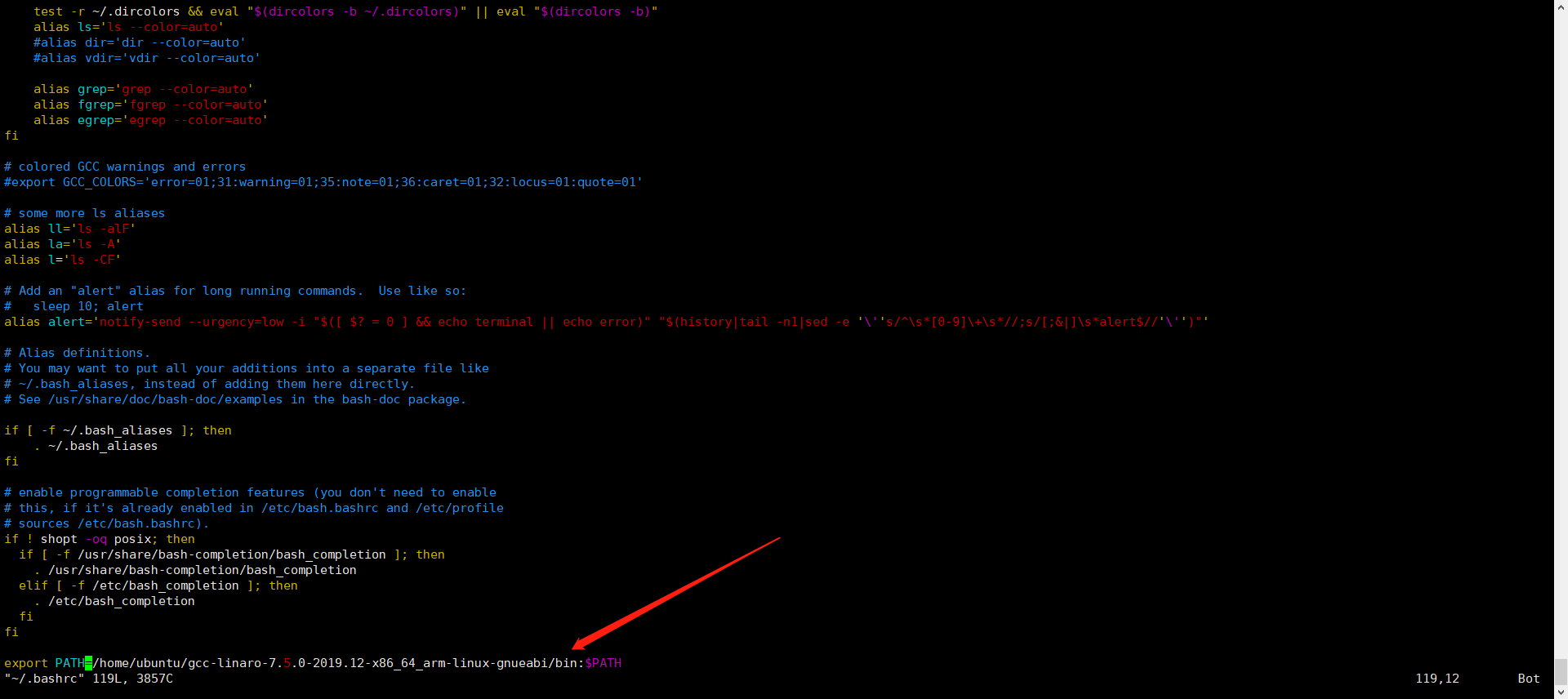 在.bashrc文件加上这行,交叉工具链的目录取决于自己解压的目录
export PATH=/home/ubuntu/gcc-linaro-7.5.0-2019.12-x86_64_arm-linux-gnueabi/bin:$PATH
在.bashrc文件加上这行,交叉工具链的目录取决于自己解压的目录
export PATH=/home/ubuntu/gcc-linaro-7.5.0-2019.12-x86_64_arm-linux-gnueabi/bin:$PATH
source ~/.bashrc #让.bashrc生效
安装成功

编译QEMU
sudo apt-get install ninja-build #Need ninja. Ninja is a small build system with a focus on speed.
wget https://download.qemu.org/qemu-7.0.0.tar.xz #下载源码
tar xvf qemu-7.0.0.tar.xz #解压
mkdir qemu_build && cd qemu_build # 在下载目录新建文件夹build
# 以下均在/build目录下
../qemu-7.0.0/configure
make && make install #出去喝杯咖啡,打两把游戏在来看结果
编译成功后,qemu-system-arm就生成在当前目录 和上面一样,将编译出的qemu的可执行文件的目录加入PATH环境变量。
vi ~/.bashrc #修改环境变量PATH
在.bashrc文件上次修改的基础上,重新修改 export PATH=/home/ubuntu/qemu_build:/home/ubuntu/gcc-linaro-7.5.0-2019.12-x86_64_arm-linux-gnueabi/bin:$PATH
source ~/.bashrc #让.bashrc生效
安装成功

编译Linux内核
内核代码下载地址:The Linux Kernel Archives
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- vexpress_defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- menuconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- -j2
ps:Versatile Express系统由ARM Ltd提供,作为CortexA9四核处理器的开发环境,硬件由uATX主板和CoreTile Express A9x4子板组成。
验证只启动Linux内核
qemu-system-arm -M vexpress-a9 -m 128M -kernel ~/linux-5.15.53/arch/arm/boot/zImage -dtb ~/linux-5.15.53/arch/arm/boot/dts/vexpress-v2p-ca9.dtb -nographic
ps:内核和设备树的路径每个人可能不一样,需要自己注意下
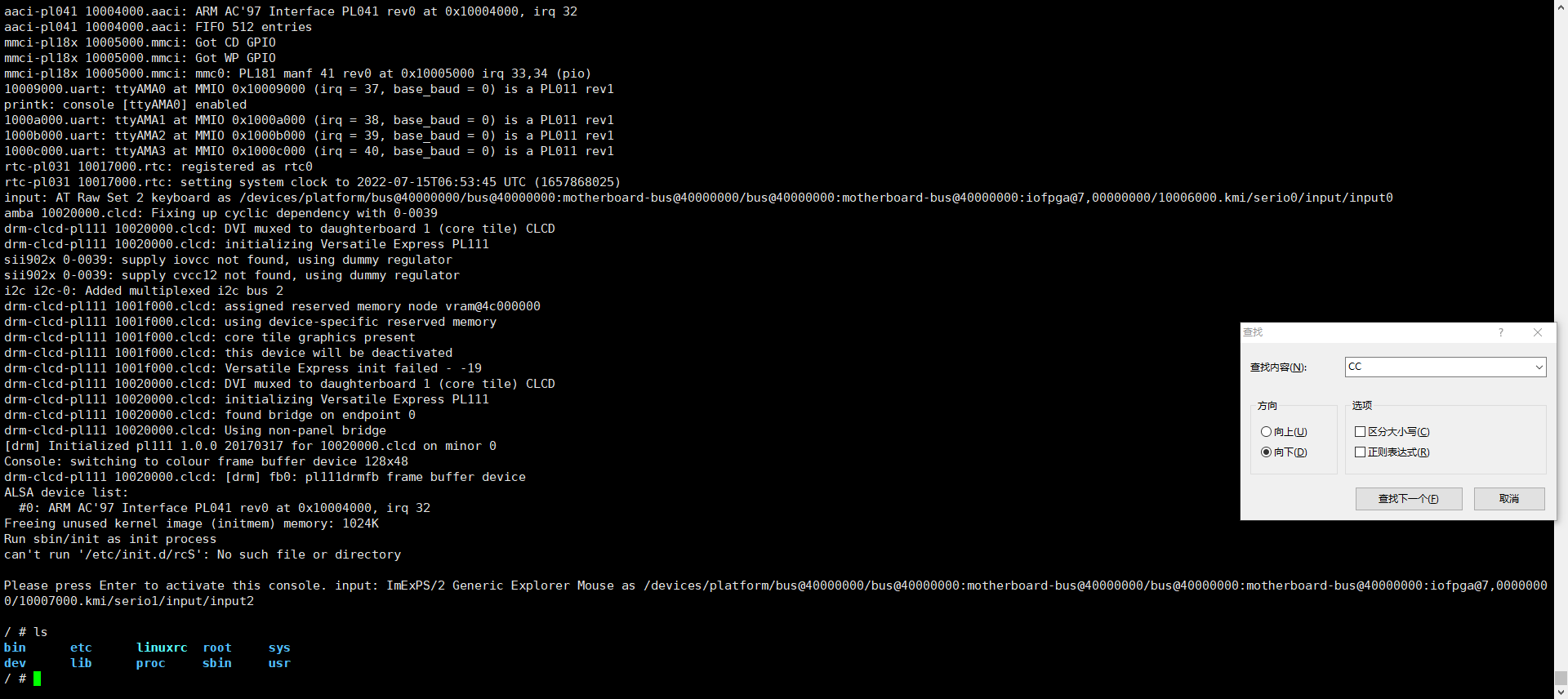
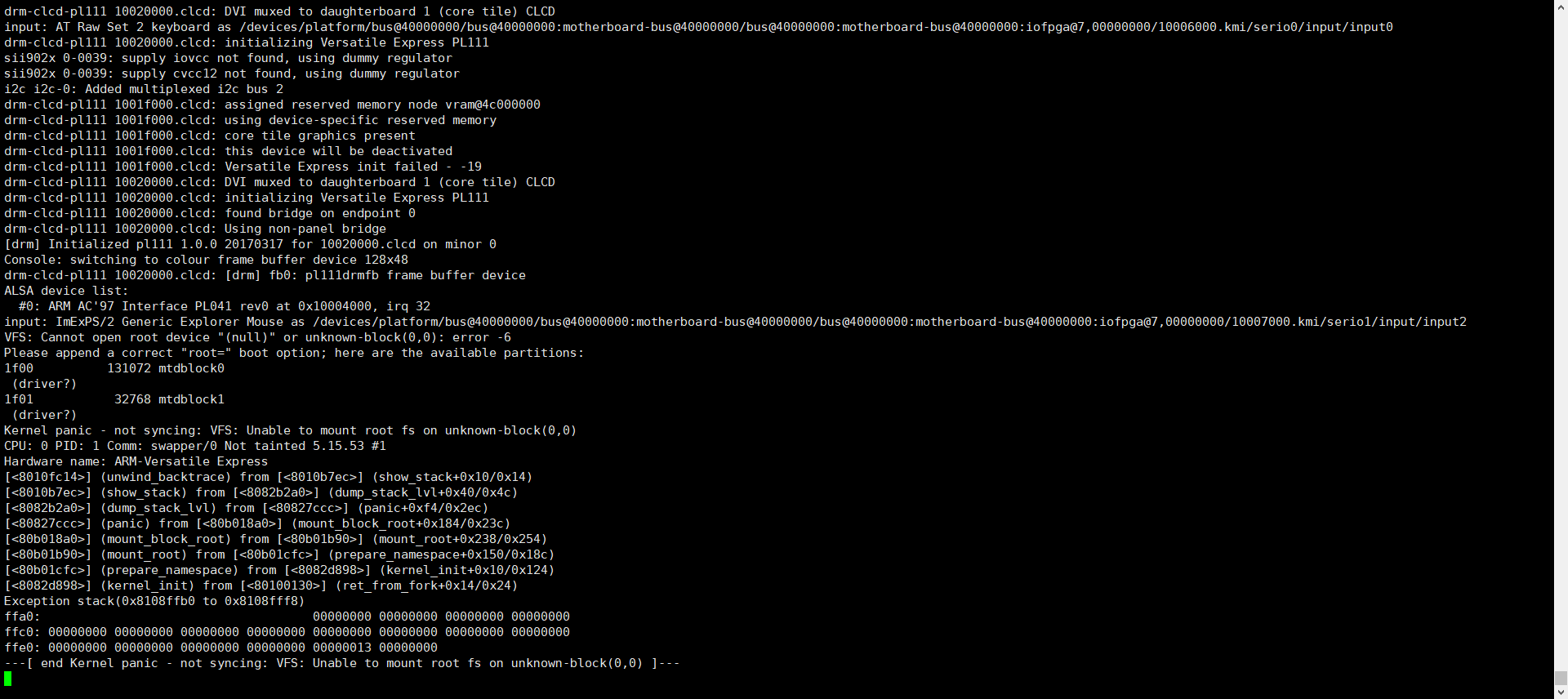 启动成功,但还没有文件系统,操作系统稍后制作。
输入ctrl+A+x退出qemu
启动成功,但还没有文件系统,操作系统稍后制作。
输入ctrl+A+x退出qemu
编译busybox,制作文件系统
编译
wget https://busybox.net/downloads/busybox-1.35.0.tar.bz2 #下载源码
tar xvf busybox-1.35.0.tar.bz2 #解压
cd busybox-1.35.0/
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- menuconfig
-
Settings —>
- [*] Build static binary (no shared libs) #使用静态库
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- -j4
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- install
- 生成结果位于:当前根目录下的_install文件夹下
- 备注:默认安装到根目录下的_install,若想更改,可以通过menuconfig里面的选项更改
制作文件系统镜像
根目录构建
mkdir -p rootfs/{dev,etc/init.d,lib,proc,sys} #创建根目录
cp -raf busybox-1.35.0/_install/* rootfs #拷贝busybox命令到根目录
sudo mknod -m 666 rootfs/dev/tty1 c 4 1 #创建4个tty端终设备
sudo mknod -m 666 rootfs/dev/tty1 c 4 2
sudo mknod -m 666 rootfs/dev/tty2 c 4 2
sudo mknod -m 666 rootfs/dev/tty3 c 4 3
sudo mknod -m 666 rootfs/dev/tty4 c 4 4
sudo mknod -m 666 rootfs/dev/console c 5 1 #创建console字符设备
sudo mknod -m 666 rootfs/dev/null c 1 3 #创建null 字符设备
vim rootfs/etc/init.d/rcS #输入如下内容
#!/bin/bash
mount -t proc proc /proc
mount -t sysfs sysfs /sys
/sbin/mdev -s
echo /sbin/mdev > /proc/sys/kernel/hotplug #支持热插拔
sudo chmod +x rootfs/etc/init.d/rcS
cd rootfs
find ./ | cpio -o --format=newc > ./rootfs.img
启动qemu
qemu-system-arm -M vexpress-a9 -m 128M -kernel linux-5.15.53/arch/arm/boot/zImage -dtb linux-5.15.53/arch/arm/boot/dts/vexpress-v2p-ca9.dtb -append "root=/dev/ram rdinit=sbin/init console=ttyAMA0" -nographic -initrd rootfs/rootfs.img
启动成功